If you want to read the first part of these blog series by Dheer Varsani, check it out here.
Introduction
Vehicle dynamics modelling and simulation are fundamental tools in automotive and motorsport engineering, playing a vital role in the design and development of road and track vehicles.
These simulations offer engineers a comprehensive understanding of how different factors, such as aerodynamics, vehicle weight distribution, and suspension geometry, influence the performance of race cars on the track.
By accurately recreating real-world conditions and race scenarios, these models enable teams to optimise vehicle setups, fine-tune handling characteristics, and enhance overall performance.
In the fiercely competitive world of motorsports, where every fraction of a second matters, vehicle dynamics modelling and simulation play a pivotal role in gaining a competitive edge, pushing the boundaries of speed, agility, and driver control.
The key aspects of Tyre Dynamics Models, Longitudinal Dynamics Models, Lateral Dynamics Models and Vertical Dynamics Models, each will be examined in this blog post.

Check out Vehicle Dynamics in F1 HERE
Tyres Modelling and Simulation:
Tyres play a significant role in the performance of a car and understanding tyre behaviour can help better predict the response to certain manoeuvres.
There are multiple tyre modelling methods, but the Pacejka Tyre model is widely used in both the motorsport and automotive industries. It is also known as the magic formula. The longitudinal or lateral force of a tyre can be calculated based on the magic formula:
y(x) = D · sin(C · atan(B · x − E(B · x − atan(B · x))))
Where:
- B = stiffness factor
- C = shape factor
- D = peak value
- E = curvature factor
- x = slip ratio or slip angle
- y(x) = output (longitudinal force or lateral force)
When looking for the longitudinal force the inputs for the model would be the slip ratio, while for the lateral force, the inputs are the slip angle.
There is a dependency of the peak value on the normal force. In the Vehicle Dynamics Modelling and Simulation Course, Course Leader Javier Sistiaga Vidal-Ribas uses MATLAB/Simulink to demonstrate how these models can be created.
Lateral Dynamics Modelling and Simulation:
To analyse the lateral dynamics, the bicycle model is used and it is coupled with the lateral tyre model to simulate the cornering performance of the vehicle.
The inputs of the model are the vehicle velocity and steering wheel angle. The outputs are the sideslip, yaw rate, lateral acceleration, and the trajectory of the vehicle from the global axis.
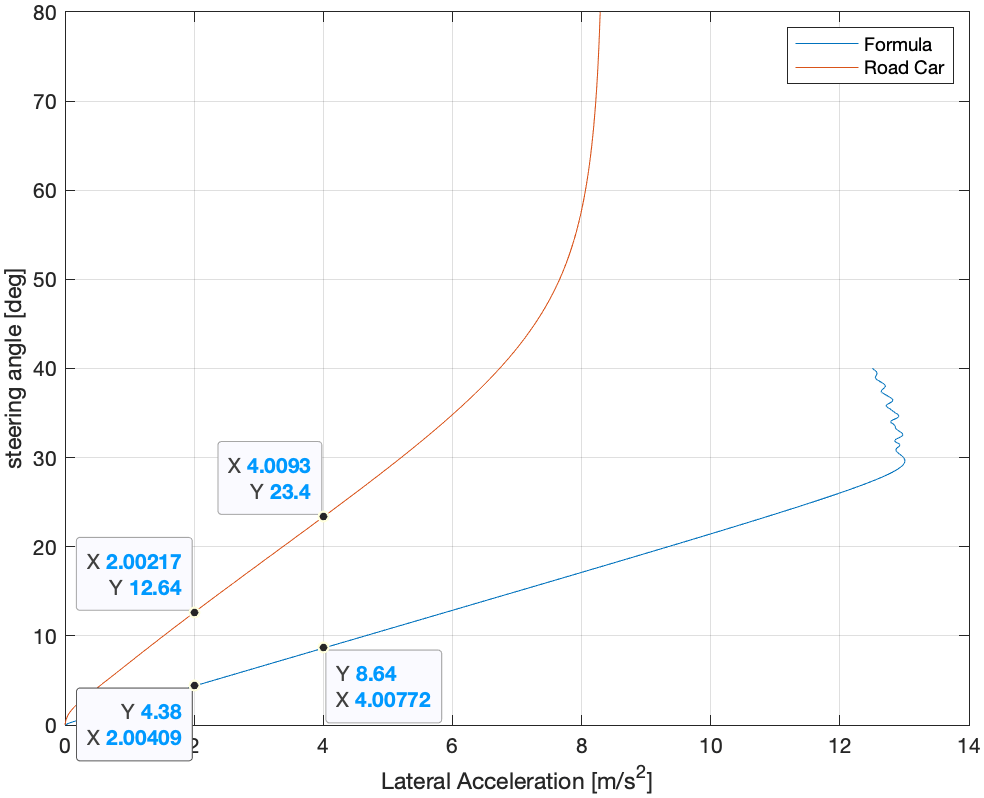
The model can then be simulated in steady state and transient states to obtain these outputs. Below are some outputs of the bicycle model comparing a Formula car and a Road Car:
This plot, for example, shows that the Formula car is more responsive than the road car. Using the information from the plot, the understeer gradient can also be calculated and it would show that the Formula car is operating very close to neutral steer while the road car is operating with understeer.
It also shows that Formula cars produce the same lateral acceleration as a road car at much lower steering wheel angles. This can be validated by calculating the gradient of the plot.
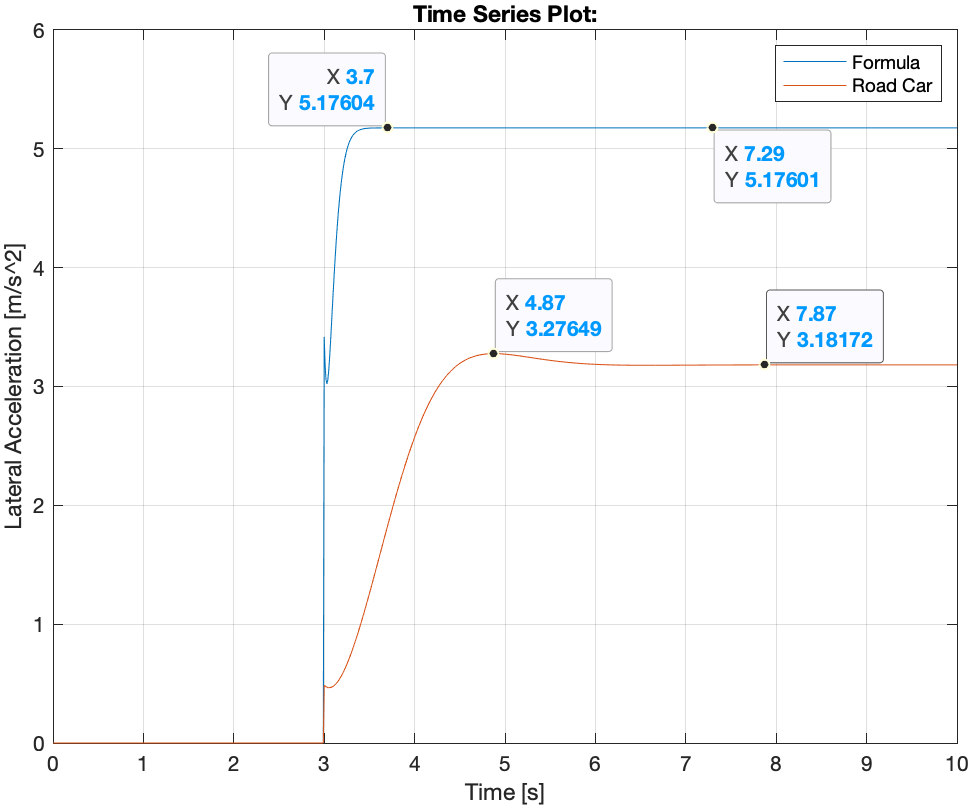
To extract maximum performance the response of the car should be critically damped. It can be seen that the response plot of the Formula car is closer to critically damped while the road car is underdamped.

Want to know more about tyres and the role of a tyre engineer? Check out Tyre Performance Engineering HERE!
Longitudinal Dynamics Modelling and Simulation:
To analyse the longitudinal dynamics, the braking and driving models can be coupled with the longitudinal tyre model. They can be used to analyse the straight line characteristics of a car.
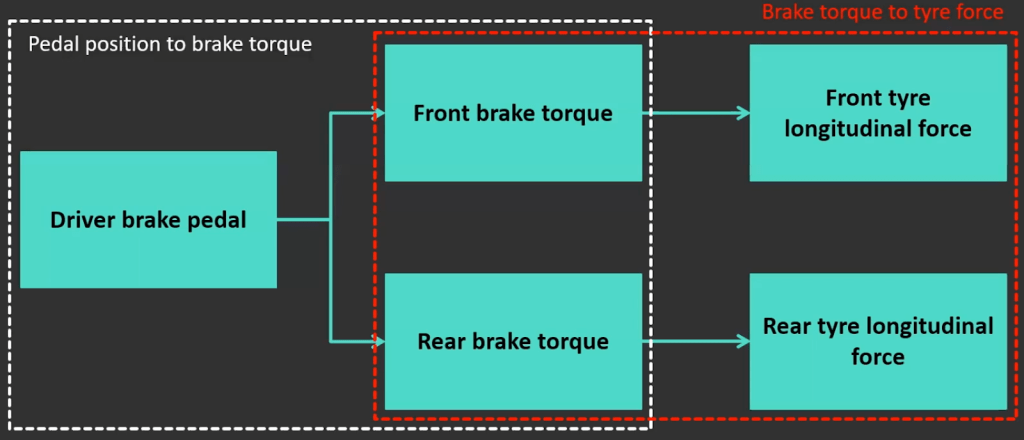
The brake model takes into account the weight transfer, the brake balance, the brake pedal position and the effect of aerodynamic loads.
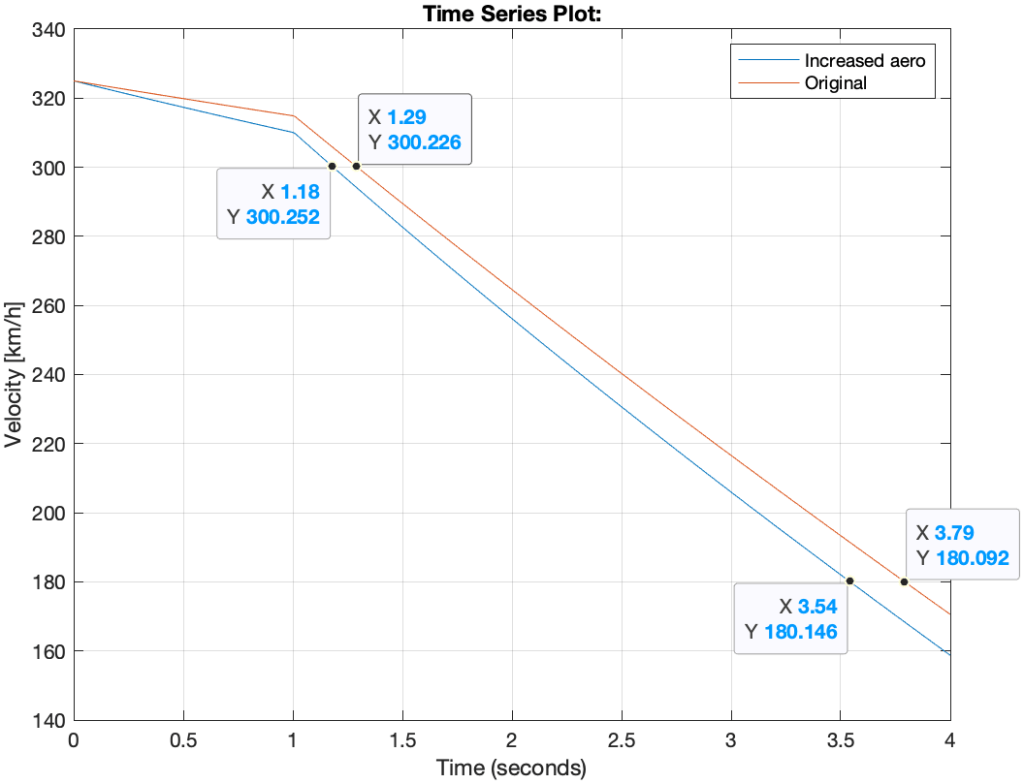
The plot above compares the effect of aerodynamic loads on the braking performance of a Formula car for high speed cornering. It shows the important role downforce plays in helping slow the car down.
With an increased aerodynamic load on the car, it can reduce its velocity much more. This means that the car can break much later and have more time to go flat out. The quantification of this effect with the model is key and could be the difference between the top step of the podium and second place.
The driving model takes into account the weight transfer from equilibrium, engine torque maps and gear ratios. The model breakdown would look similar to the brake model with the differences being the throttle position, wheel rotation speed and gear ratio.
From this model, different steering geometries can be examined. In automotive engineering, Ackermann steering geometry (which involves turning the inner wheel more than the outer wheel for smoother turns) is widely used because the aim is to avoid excessive tyre wear as much as possible, especially during low speed cornering.
Vertical Dynamics Modelling and Simulation:
The vertical dynamics can be studied in the time domain or the frequency domain to analyse the vehicle response to vibrations such as those induced by road irregularities or suspension system dynamics.
Frequency domain simulations provide insights into the resonance frequencies, damping characteristics, and frequency-dependent behaviour of the vehicle, aiding in the design of optimised suspension systems and vibration isolation measures.
Generally, road car suspension frequencies are between 1-3 Hz and for high performance cars between 3-5 Hz.
The quarter car model can be used for target setting and two quarter car models can be coupled together to give the 4DoF model. The inputs to the models would be the road roughness and the outputs of the models would be the:
Quarter car model:
- Sprung mass vertical (acceleration, velocity, displacement)
- Unsprung mass vertical (acceleration, velocity, displacement)
4DoF model:
- Sprung mass vertical (acceleration, velocity, displacement)
- Unsprung mass vertical (acceleration, velocity, displacement) – Front & Rear
- Sprung mass pitch (acceleration, velocity, displacement)
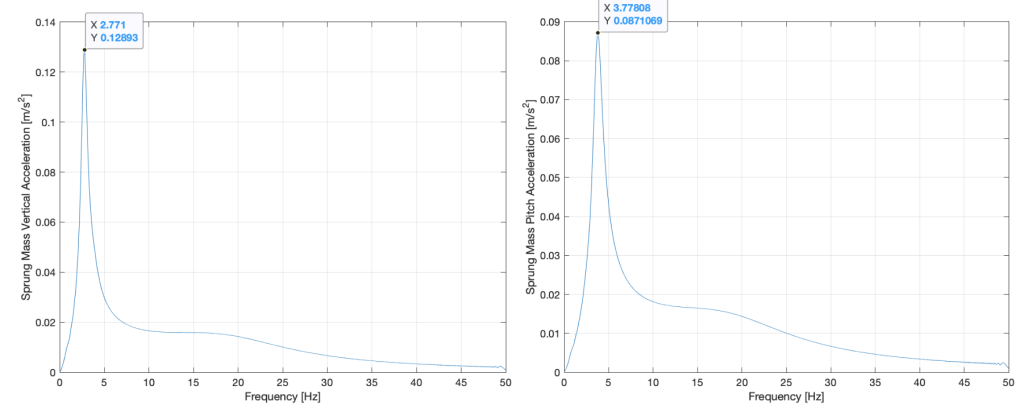
These plots have two peaks, the first one is the resonance of the sprung mass and the second will be of the unsprung mass (peak one is much higher because there is some coupling happening between the two but the main resonance comes from the ride frequency).
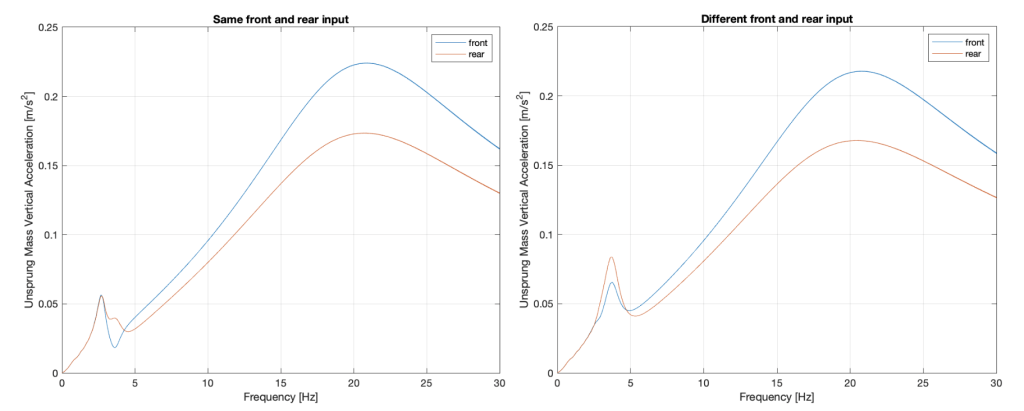
The plot above compares the response for the unsprung mass with the same front and rear input and the other compares the response with different front and rear input. Depending on the vehicle design, this needs to be considered in the model.

Check out Vehicle Dynamics – Modelling & Simulation HERE
Conclusion
By understanding and optimising models like these, engineers have been pushing the boundaries of automotive and motorsport ride and handling, delivering vehicles that offer a perfect balance of agility, stability, and comfort.
Utilising tools such as MATLAB/Simulink, engineers can create detailed models to represent the vehicle dynamics of a car.
However, it’s important to note that while MATLAB/Simulink is a popular choice, there are other options available for creating parametric models, each with its own strengths and applications.
These models can be validated through Software-in-the-Loop or Hardware-in-the-Loop applications and the next step would be to create multibody simulations to create high-fidelity models.

Check out F1 Engineering package HERE

Meet the Author
Dheer is currently pursuing an MSc in Automotive Engineering at Cranfield University after completing his Bachelor’s in Mechanical Engineering in the US. He has built his experience through not only his studies but also by investing in his passion for high-performance vehicles through courses and hands-on opportunities. Outside engineering, he enjoys following F1 and other sports (like golf and football to name a few).
Check out all of Motorsport Engineer’s courses here.
Check out this video where the instructor of the course Vehicle Dynamics: Modelling and Simulation Javier Sistiaga talks about the skills that you will acquire in it: